随着HTC One M8内置UFocus重新对焦,一圆消费者想以智能手机拍出浅景深的梦想。近日,Google为了让所有安卓的手机平板用户(软件更新至Android4.4以上版本)都能拍出模糊景深,便最新发布了Google camera App。除了让手机拍出单反的景深效果外,新增球型全景模式,势必让Google camera成為照相App中最热门的软件。
在Google camera App中(点击此处至google Play下载),基本的相机功能中设有曝光/闪光灯补偿、九宫格构图线与HDR。较為特别的「全景相片」模式,可拍出360度球形全景照,在上传到google+或google地图景观后,能產生立体旋转观看的效果。另一项特殊的模式「镜头模糊」,可达到等同HTC one M8的浅景深(Pro Look)与改变主题与景深位置(UFocus)的功能。
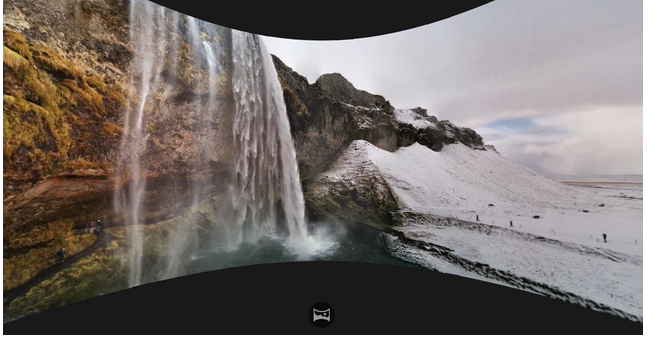
Google camera app所拍的全景照片可以上传至google+/google地图景观后,以旋转方式观看
这个APP的使用方式也是在开启App中的镜头模糊功能后,手机画面会出现“请缓慢向上移动装置,让景物保持在画面中央”的字样,这时只需轻轻向上移动手机,让它对实景进行扫瞄(连拍几张照片)。运用特殊运算程式,重新计算画面中每个物件的3D位置、估算深度与距离,在需要事后改变对焦位置时,就能清晰地显示该主体,其餘的部份就以模糊方式显示。

左边为一般拍摄效果,右边则是镜头模糊功能。
Google camera App,对焦演算法更精细
镜头模糊所使用的特殊运算方式,与光场相机、诺基亚Refocus一样,都是以光做为分析计算要素。首先,以2D转换3D常见的位移回复结构(SfM,Structure-from-Motion)运算,计算出相机移动时、画面主体、及其移动量在立体空间例,点线面等资讯的关联性。再交由多视点立体(MVS,Multi-View Stereo)大略重组、重建当下的场景。

中间为深度图,确定主题后在进行背景模糊化。
最后,使用马可夫随机场(MRF,Markov Random Field),与绝对值总合(SAD,Sum of Absolute Differences)演算每项主体的相对关系。将上述的资讯,先透过灰阶定义每个像素的绝对位置,再以邻近像素点在彩度上的差异,逐一取出绝对差值,估算出像素点之间的相对距离。透过这两种方式,交叉演算三维空间(肉眼所见)里正确聚焦时的表现。